La puesta a punto – Parte 4ta.
Por Juan Carlos Pesce (LV 2820)
Sumándose a las anteriores notas de Paul Walker sobre su metodología referida al trimado de modelos F2B (la cual, por supuesto también puede aplicarse a modelos de otro tipo) se agrega ahora una nueva entrega. Cumplimos entonces en hacerles llegar sus consejos y comentarios, basados en su Diagrama de Trimado el cual hemos mostrado en la Parte 1ra. de esta serie de notas.
En esta oportunidad se verá en profundidad el quinto paso del citado diagrama (Giros y tracking iguales en ambos sentidos), un tema que, cabe señalar, todavía está dentro de la sección "Ajuste Básico". Este punto merece más atención que un simple par de palabras en el Diagrama de Trimado. Muchos de los cambios del ajuste que afectan a las velocidades de giro también impactan en el tracking (trayectoria). Para analizar esto hay otro diagrama de flujo que permite ir trabajando de manera sistemática a través de estos cambios de la puesta a punto, con el objetivo de minimizar el tiempo y los dolores de cabeza en la resolución de estos criterios. Ese nuevo diagrama de flujo toma todo el quinto paso del Diagrama de Trimado y lo analiza en detalle en el Diagrama Complementario “A”.
Si bien este nuevo diagrama teóricamente podría haber sido insertado dentro del primero, ocurre que sería más difícil poner todo completo en una sola página para luego hacer las necesarias referencias, se convertiría en un “mamotreto” con un recorrido muy “denso”. Como esto todavía está dentro de la sección básica del ajuste, eso significa que las preguntas que se formulan en este nuevo diagrama se pueden responder fácilmente en forma objetiva. Solo dependen de una observación fácil de contestar. Se requiere algún tipo de evaluación cualitativa de las maniobras, tanto las internas (ruedas afuera) como las externas (ruedas adentro), y con un poco de práctica será más fácil de ver y evaluar, tanto para el piloto como para el coach.
El objetivo del quinto paso es llegar a tener iguales las velocidades de giro de las esquinas interiores y exteriores, así como que el tracking (trayectoria) del modelo sea el mismo tanto en posición normal (cabeza arriba) como en invertida.
Los criterios desarrollados en el Diagrama de Trimado permitieron ajustar el CG para hacer manejables los giros en las esquinas, nivelar las alas, ajustar los cables de salida y obtener el peso optimo del lastre de la puntera. Con todo, todavía hay numerosos ajustes para lograr que los giros en las esquinas sean iguales, si no lo fueran. Por lo general estos numerosos ajustes son (aunque no se limitan solo a estos): timón de profundidad y flap alineados, el ajuste de la manija, ajuste del timón de dirección, la alineación 0-0-0 en general, y posibles reviraduras de los flaps. Un item que no será discutido aquí (en este punto) es la alineación del motor (línea de tracción).
Para iniciar el recorrido del Diagrama Complementario “A” corresponde evaluar cuidadosamente la relación entre las velocidades de los giros interiores y los exteriores, tal como se sugiere en el Cuadro 1 de este diagrama. Esto puede ser un poco difícil al principio, y la manija puede estar “desajustada”, para compensar esta diferencia. Si este es el caso, por lo general se muestra más adelante (Cuadro 10) como una diferencia de tracking.
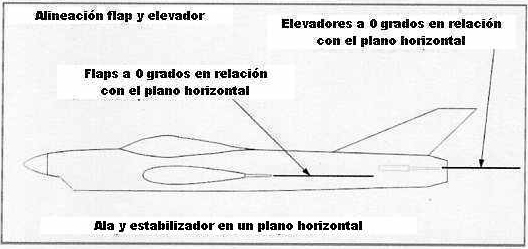
La solución de esos problemas de tracking lo llevará nuevamente al punto de partida (Cuadro 1), para volver a evaluar las velocidades de giro. Si los giros internos y externos no son iguales, hay que empezar por volver a examinar la alineación del timón de profundidad y los flaps, Cuadro 2. Una descripción de esto se muestra en la figura “Alineamiento de flap y timón de profundidad”.
Asegúrese que tanto los flaps como el timón de profundidad estén a cero grados respecto del plano horizontal. P. W. usa en su taller una estructura en la que puede acomodar el ala ubicada en un plano horizontal por encima del plano horizontal de la mesa de trabajo. También tiene otra estructura en la que apoya el estabilizador, para soportar completamente al modelo. A continuación, conociendo la distancia a la que la línea central del ala está por encima de la mesa, se puede medir el borde posterior del flap para ponerlo a cero grados relativos.
El mismo procedimiento se efectúa en el timón de profundidad. El push rod se ajusta hasta que los flaps y el timón de profundidad quedan a cero grados. Este es entonces el punto de partida para mover al Cuadro 3. Antes mencionamos la alineación 0-0-0. Es el ajuste preferido para mantener la línea de tracción del motor, la línea central del ala y la línea central del estabilizador en 0-0-0. Esto puede ser ilustrado usando un sistema de coordenadas.
Este sistema de coordenadas aplicado al modelo se denomina Sistema de Coordenadas Globales. En este sistema el eje “x” es de proa y de popa, el eje “y” es lateral (puntera a puntera), y el eje “z” es vertical. Para ser 0-0-0, la línea de tracción del motor se encontrará en un plano x-y, la línea central del ala en un plano x-y, así como también el estabilizador.
Cada uno de estos planos se puede ubicar a una altura diferente en el eje z, pero son todos paralelos. Esto hace que el ángulo relativo entre ellos sea 0, así es el método 0-0-0. Algunos prefieren tener un empuje hacia abajo en el motor y otros incidencia positiva en el estabilizador, pero P.W. prefiere tener todo en 0-0-0. La posibilidad de modificar alguno de estos valores puede ser evaluada más adelante, en la sección de ajuste avanzado. Por ahora, se va a establecer como regla la aplicación del 0-0-0, y los flaps y el timón de profundidad en 0-0, también.
Si los flaps y el timón de profundidad están nivelados en 0-0 y el avión todavía no hace los giros iguales (los internos y los externos), observe de cerca los flaps. Revise cuidadosamente para asegurarse que son totalmente rectos. Sí, ellos salieron rectos del taller, pero a veces el sol, la humedad y el calor pueden afectar (hinchar, comprimir, revirar, etc.) la madera balsa de que la mayoría están hechos. Si ellos no están rectos, se deben enderezar en este momento.
Hay muchas maneras diferentes de aplicar calor para ablandar la pintura o el recubrimiento para permitir una flexión y luego enfriar la zona. Una vez que esté a temperatura ambiente de nuevo, vuelva a revisar para constatar que la reviradura ha desaparecido. Si ahora el flap está recto, vuelva a instalarlo en el modelo y repita la prueba. Tenga en cuenta que al corregir la reviradura del flap, es probable que tenga que volver a nivelar el ala, lo cual lo conduce de vuelta al primer paso en el Diagrama de Trimado (visto en la Parte 1ra. de esta serie). Vuelva a nivelar el ala y con todo cuidado ejecute nuevamente el trabajo sugerido en el Cuadro 1 del Diagrama Complementario “A” observando cuidadosamente todos los pasos del Diagrama de Trimado que llevan al quinto paso.
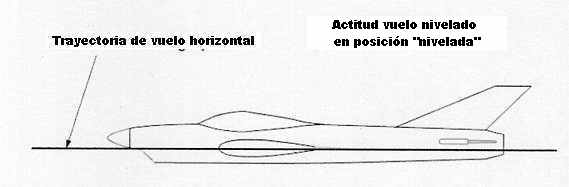
La siguiente etapa es el Cuadro 4, que evalúa el ángulo de inclinación del modelo con relación a una trayectoria de vuelo horizontal. Una actitud perfecta se ve en la figura “Actitud de Vuelo Nivelado”.
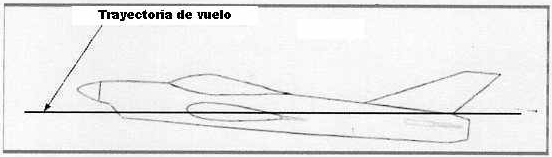
El ala y el estabilizador son paralelos a la trayectoria de vuelo horizontal. Así se debe ver si todo está bien. Sin embargo, este no es siempre el caso. La figura “Vuelo Desnivelado” muestra una configuración donde hay un ángulo de cabeceo positivo, donde la cola está baja en relación con el ala. (Tenga en cuenta que la cola podría estar arriba con respecto a la línea horizontal tanto como abajo). Estas figuras muestran el modelo en vuelo “ruedas abajo”.
Observe que esto está pasando en vuelo invertido también. Si la cola está abajo en vuelo recto normal y está arriba en vuelo invertido, se debe ajustar el timón de profundidad hacia abajo con respecto a los flaps. El acortamiento del push rod del flap al timón de profundidad hará esto. Siga trabajando sobre este punto hasta que la pregunta en el Cuadro 5 se pueda responder afirmativamente. Los mismos no necesitan ser perfectamente nivelados en ambos sentidos, pero sí la misma cantidad de ángulo de inclinación en ambos sentidos. Por ejemplo, la cola puede estar dos grados abajo tanto en posición normal como invertida.
Esta es una solución aceptable en este momento. De hecho, según dice P.W., él ha visto muchos modelos acrobáticos que vuelan con la cola abajo en ambos sentidos (normal e invertido) y hacen buena acrobacia. No se obsesione con esta etapa del diagrama tratando de conseguir nivelar perfectamente en ambos sentidos. ¡Nunca se puede lograr!
Hasta ahora todo se ha hecho respetando el Diagrama de Trimado, pero podría ser que a pesar de ello el modelo no gire igual en ambos sentidos (normal e invertido). Muchas veces el ajuste de la manija es el culpable. Es sorprendente como uno se puede adaptar a las manijas desajustadas y aún así volar bien. ¡Esta situación engañosa podría llevar a considerar como que está todo bien!
Pues entonces es hora de revisar atentamente la manija. El primer paso es comprobar el neutral de la misma, según se indica en el Cuadro 6. Si las esquinas interiores son más rápidas que las esquinas exteriores, entonces hay que acortar la línea del comando hacia abajo y volver a intentarlo. A la inversa, si los giros exteriores son más rápidos, acortar la línea del comando ascendente y volver a probar. Si esto no resuelve el problema, hay que pasar al Cuadro 7 y evaluar el sesgo de la manija.
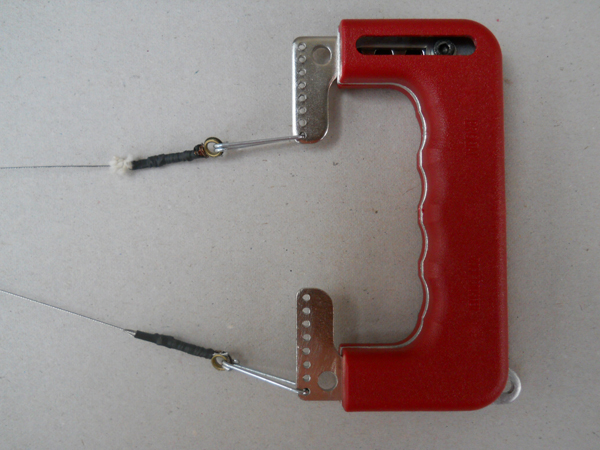
En la figura “Manija sin sesgo” (imagen superior), la línea ascendente y la línea descendente reciben un espaciamiento uniforme sobre la mano y entregan comandos balanceados al modelo. Sin embargo, también cabe considerar la opción de una “Manija sesgada”, la cual proporciona más comando hacia abajo, y menos hacia arriba, lo que ayuda a un modelo que es demasiado rápido en las esquinas interiores.
Pruebe este cambio y proceda a reevaluar. El ajuste del neutro de la manija y el sesgo pueden terminar actuando en conjunto y uno compensar al otro. Paul Walker sugiere que el sesgo sea ajustado a la posición neutral antes de volver a ajustar el neutro. Después de alcanzar este punto en el Diagrama de Trimado, si el modelo todavía no gira igual en ambos sentidos, la geometría básica del sistema de control debe ser considerada.
La técnica antigua era que los cuernos de flaps y elevadores se orientaban verticalmente. Si bien esto es fácil de ver y alinear, no proporciona una respuesta lineal con respecto a la rotación del balancín. Esto puede causar diferencias entre las velocidades de los giros interiores y exteriores, que pueden ser difíciles de resolver. ¿Cual es la geometría correcta para proporcionar una respuesta lineal? Hay muchas variables, por lo tanto no hay respuestas "simples" a esa pregunta.
Debido a esto, Howard Rush desarrolló un programa de Excel que hace precisamente esa tarea. P.W. lo ha utilizado para desarrollar la geometría del sistema no lineal en el “Predator”. Este programa lo veremos en una entrega separada.
En este punto del Diagrama Complementario “A” el énfasis se pone en el tracking del modelo. Las velocidades de los giros se han tratado tanto como fue posible. El Cuadro 8 evalúa el tracking en vuelo nivelado y en invertido. Si el modelo tiene el mismo tracking en ambos sentidos, se procederá hacia el paso sexto del Diagrama de Trimado que fue incluido en la Parte 2da. de esta serie.
Sin embargo, si no son iguales, en el Cuadro 9 se pregunta si la diferencia es "significativa". Una vez más, si usted siente que puede vivir con la diferencia, vuelva al paso sexto del Diagrama de Trimado. Sin embargo, no deje que esto le complique la vida. Si el modelo tiene un mejor tracking en invertido, hay que mover el timón de profundidad hacia abajo con respecto al flap y reevaluar. Pero si tiene un mejor tracking cuando vuela derecho, se debe mover el timón de profundidad hacia arriba en relación con el flap y volver a evaluar. Después de estos cambios, el Cuadro 10 pregunta si el balance del tracking entre el vuelo derecho y el invertido ha mejorado. Si no, vuelva a ajustar y reevaluar.
Existen dos opciones aquí. La primera es que el tracking se encuentre ahora adecuadamente equilibrado entre el vuelo derecho y el invertido, en cuyo caso el diagrama dirige al usuario al Cuadro 1 para volver a evaluar el equilibrio de las velocidades de giro. La segunda opción es que después de haber recorrido varias veces el Diagrama Complementario “A” no se haya logrado tener iguales velocidades de giro y un tracking similar tanto en los giros interiores como en los exteriores. Entonces el Cuadro 12 sugiere que seleccione el ajuste fino que equilibre las velocidades de giro tanto como sea posible y equilibre las desigualdades de tracking tanto como sea posible y luego volver al paso sexto en el Diagrama de Trimado.
Hay muchas cosas que afectan el tracking (trayectoria). Algunos de ellos son: la cantidad inadecuada del lastre de la puntera, el ala desnivelada, la posición de los cables de salida y distintas reviraduras localizadas en diferentes lugares del modelo. Hemos partido del supuesto de que antes de entrar en esta sección del diagrama esos aspectos fueron solucionados al recorrer los diferentes pasos del Diagrama de Trimado.
Sin embargo, pequeñas cantidades de algunas de esas cosas pueden hacer una diferencia entre el vuelo, derecho e invertido. Pero como todo esto sucede todavía en la sección "Ajuste Básico", el modelo aún no tiene un ajuste fino y esa puede ser la causa de un mal tracking. El Diagrama Complementario “A” está destinado a cubrir algunas de las cuestiones "gruesas" que deben abordarse. En la sección avanzada, se pondrá más énfasis en estos temas.
Este es el final de la sección "Ajuste Básico" del Diagrama de Trimado. Esta ha sido la parte "fácil" del proceso de ajuste. A partir de la próxima entrega, nos anuncia Paul Walker, los aspectos más avanzados del trimado comenzarán a ser discutidos, ¡empiece a pensar en lo que usted realmente quiere que su avión haga!
Como siempre, reitero mi agradecimiento a Ricardo “Nuno” Herbón por su colaboración al revisar la traducción.
|